
激光捕获(Trapping)是纳米世界操控物体运动的强大工具,因其在真空和液体等悬浮介质环境中的广泛应用而荣获1997年和2018年诺贝尔物理学奖,但在固体接触表面上仍然具有挑战性。近日,我校光电学院庄松林院士带领下的谷付星教授课题组,发明了一种基于光热冲击效应的激光捕获技术,称为光热冲镊(Photothermal-Shock Tweezers),实现了固体界面上对微纳物体的捕获及任意操控,并探索了其纳米机器人应用。相关成果于2023年11月24日发表在《自然·通讯》(Nature Communications)上。
机器人技术给世界带来革命性变化。光热冲镊系统可以无缝继承宏观世界中的机器人技术,在微观世界中实现智能机器人工作的场景。团队使用一个金属纳米片,结合图像识别、深度学习、路径规划、及反馈控制等技术,实现了世界上第一个具有清洁功能的自主纳米机器人(见视频)。通过识别所选取区域的清洁程度,机器人将重复清扫循环,直至达到满意的清洁度。
上海理工大学谷付星教授为论文通讯作者,团队成员博士生顾兆麒、朱润琳和沈天赐为共同第一作者(图1)。其他单位的合作者包括河北工业大学刘旭教授,及美国奥本大学刘嘉教授。研究工作得到了国家及上海自然科学基金的资助。该论文的发表是光电学院围绕学校高水平大学建设目标,奋力改革、勇于创新的结果,也体现我校在研究生培养教育方面高水平的成果产出。
图1 论文共同第一作者:左起,博士生朱润琳、顾兆麒、和沈天赐
该成果发表后,已有多家媒体关注和评论。国外媒体如AZOAI发表了Silpaja Chandrasekar博士的评论文章,对该成果高度评价:“researchers introduced a game-changing solution to nanorobotic motion limitations on solid surfaces.[研究人员针对固体表面上的纳米机器人运动限制推出了一种改变游戏规则的解决方案]”。“Overall, this groundbreaking technique demonstrated its adaptability by manipulating various nanomaterials. [总的来说,这项突破性技术通过操纵各种纳米材料证明了其适应性]”.国内媒体如果壳网和《麻省理工科技评论》中国/DeepTech也做了相关的采访。
研究人员使用脉冲光源加热微纳物体,被吸收的光脉冲能量瞬间转化为机械膨胀,在物体内部产生极大的瞬时载荷,称为光热冲击 (Photothermal Shock)。该瞬间冲击效应产生的作用力远超普通振动模式,就像蛇类捕食瞬间猛扑速度远超一般爬行速度(图1),因此可以打破微纳阻力困境,实现在固体界面上的移动。
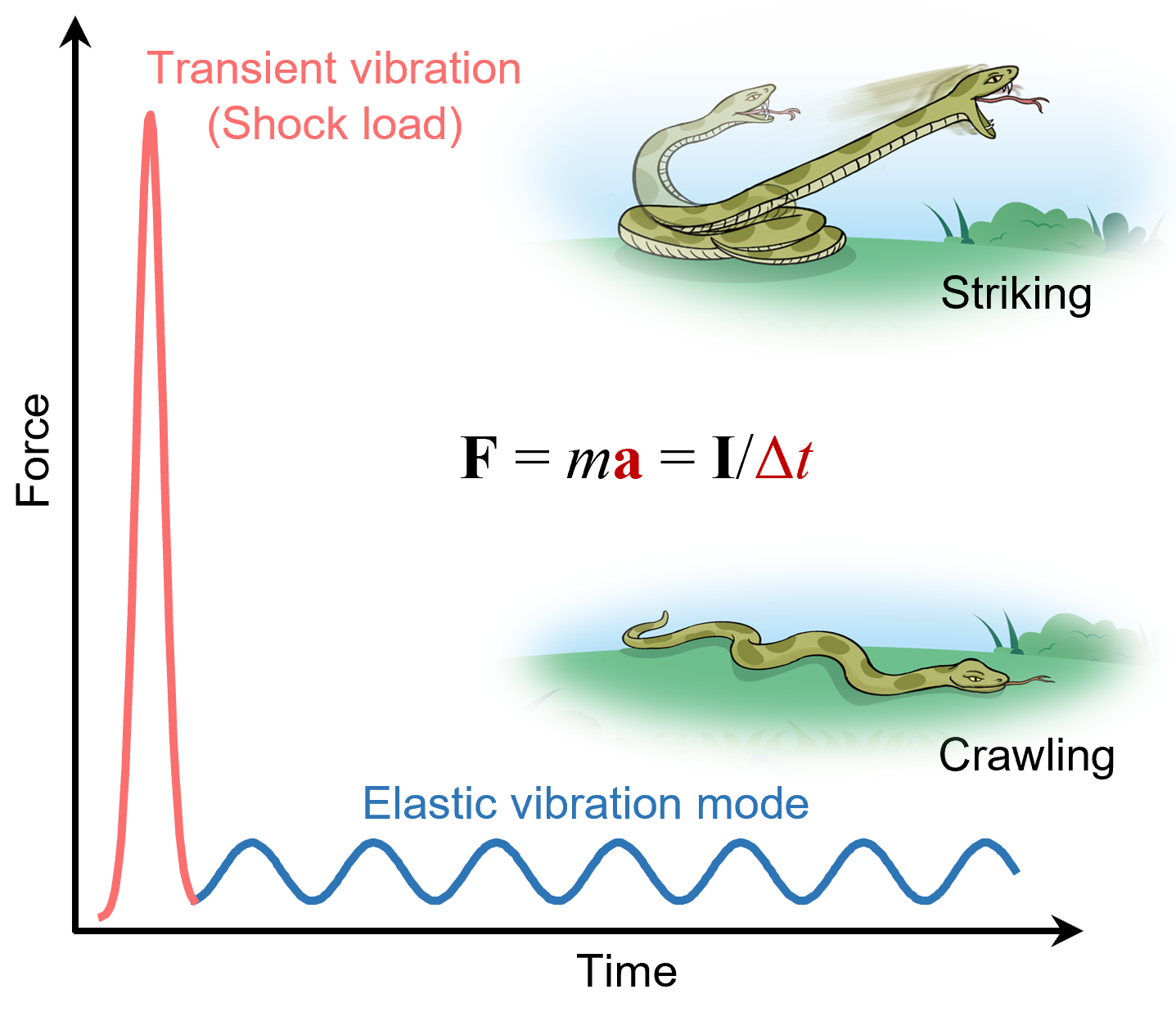
图2 冲量-动量定理原理图。插图展示了蛇类猛扑和一般爬行的视觉对比。
捕获(Trapping)特性是激光操控技术的核心,因为它可以通过光斑位置来掌握粒子的动向,实现任意的运动控制,而不仅仅止步于缺乏控制的致动(Actuation)。如图3a和3b所示,金纳米线在532nm纳秒脉冲的高斯型光斑作用下,会向光斑内部移动,直到纳米线的中心与光斑中心一致,这是一个典型的捕获过程(见视频)。研究人员通过理论分析,找到了光热冲击驱动力的物理来源,因表达式中包含温度梯度,因此该力被称为光热梯度力。当移动光斑时,光热梯度力分布平衡被打破,纳米线重新向光斑中心移动,一直重复该过程,纳米线就会随着光斑一直轴向移动(图3d)。另外对被捕获在光斑中央的纳米线,提高激光功率将会使纳米线两端受到更大光热梯度力挤压而侧向弯曲,从而实现侧向移动(图3e)。这样就实现了纳米线在二维平面上的任意运动。图3f和3g展示了研究团队将多根纳米线拼成汉字“冲”和英文单词“SHOCK”的图案。
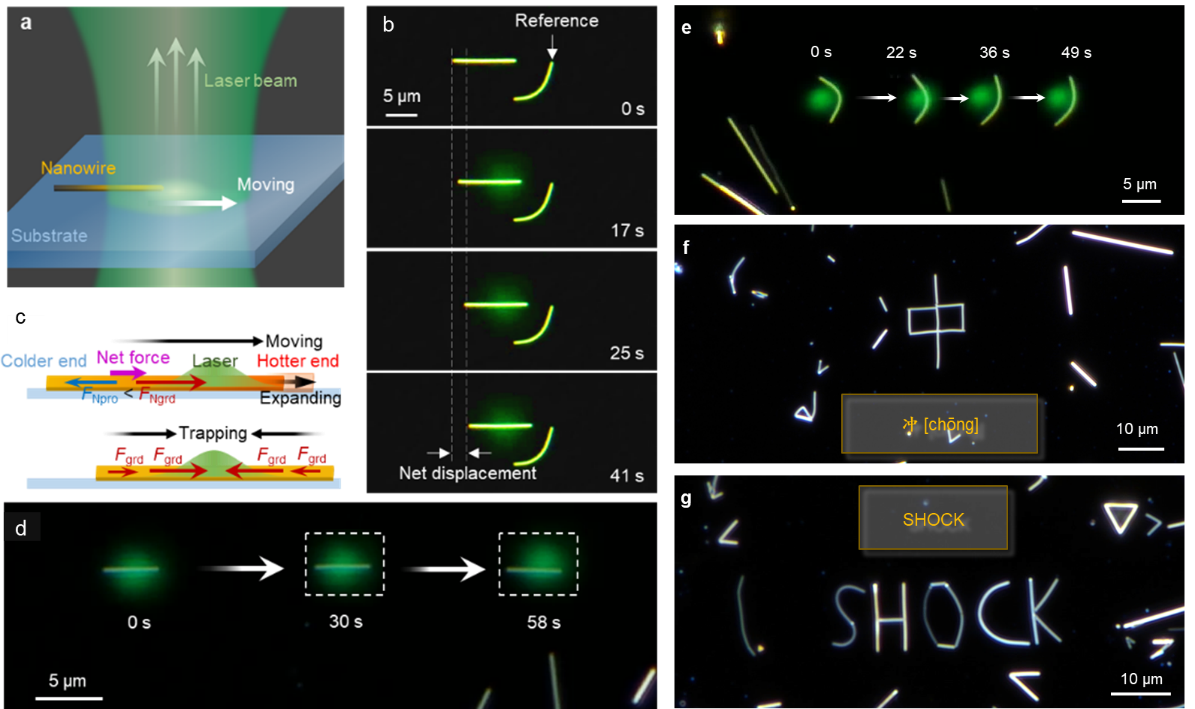
图3光热冲镊操控纳米线。 (a)捕获金纳米线示意图。 (b)捕获金纳米线连续时序照片。 (c)捕获原理图。 (d和e)长距离操控纳米线轴向和侧向移动。
(f和g)拼装的汉字“冲”和英文“SHOCK”。
研究人员又利用金属钯纳米片为底盘搭建了一个结构更复杂、功能更多样的纳米机器人,因形似中华鲎,被称为HOUbot(图4a及视频)。该机器人能像汽车一样自由移动 (图4b),并做出头部推动(图4c)、独立尾部摇摆(图4d)和戳刺(图4e)等更高自由度和精细的动作。机器人身上搭载半导体纳米线可用于原位湿度传感(图4f)。由于其相对较大的表面,该机器人具有很强负载能力,理论有效载荷可以达到毫克量级(相当于一只蚂蚁的质量)。通过采用现有的宏观机械设计来装备更多的机载组件或货物,HOUbot可以像宏观机器人一样工作,是世界首个利用传统机械手段实现的可执行具体任务的纳米机器人。
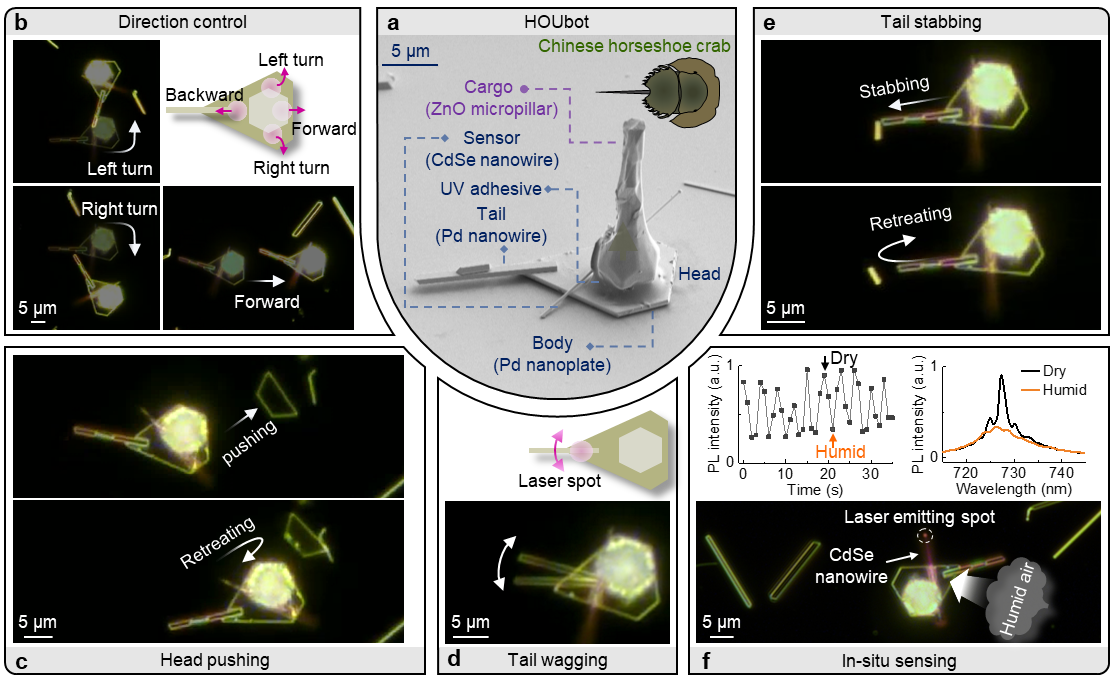
图4复杂的纳米机器人HOUbot。 (a) HOUbot的SEM图,插图为中国鲎。 (b)自由运动控制。 (c)头部推动。 (d和e)独立尾部摆动和戳刺。 (f)原位湿度传感。
光热冲镊技术的发明使得激光操纵突破了界面阻力困境,补全了光操纵的应用环境,使得激光最终实现了可在堪比海陆空三界(真空/气体,液体及固体)的微纳环境中任意操控物体 (图5)。在物理上,则聚焦了瞬态热弹性动力学和摩擦学,特别是非破坏性研究,这进一步揭示微观领域机械动力过程的理解。该技术原理上可以用于任何波长范围和任何可吸收材料。此外,通过空间光调制和多机器人协作,可以实现自主纳米机器人集群,完成目前常规手段不能实现的复杂任务。该技术有望在纳米制造、生物医学、航空航天及军事等各个领域发掘出前所未有的应用场景。
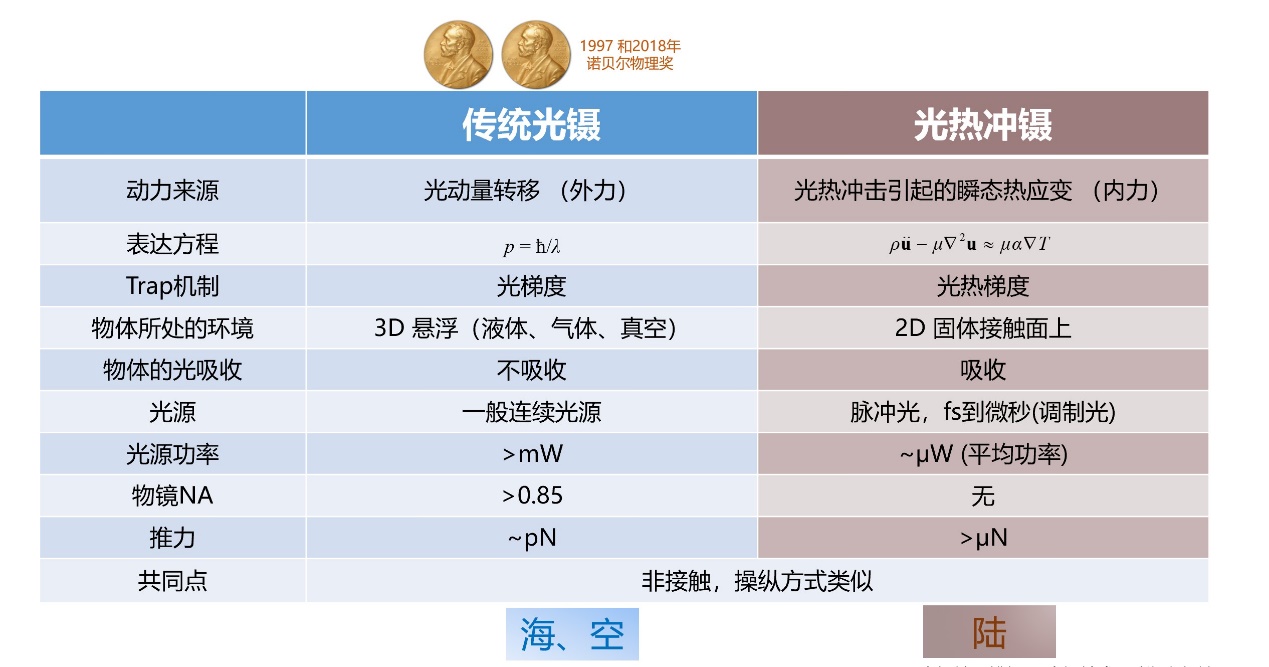
图5 传统光镊与光热冲镊对比
论文视频展示:
论文信息:https://www.nature.com/articles/s41467-023-43433-6
AZOAI网站Silpaja Chandrasekar博士的评论文章:https://www.azoai.com/news/20231129/Autonomous-Nanorobots-Achieve-Powerful-Thrust-on-Dry-Surfaces-Using-Photothermal-Shock.aspx